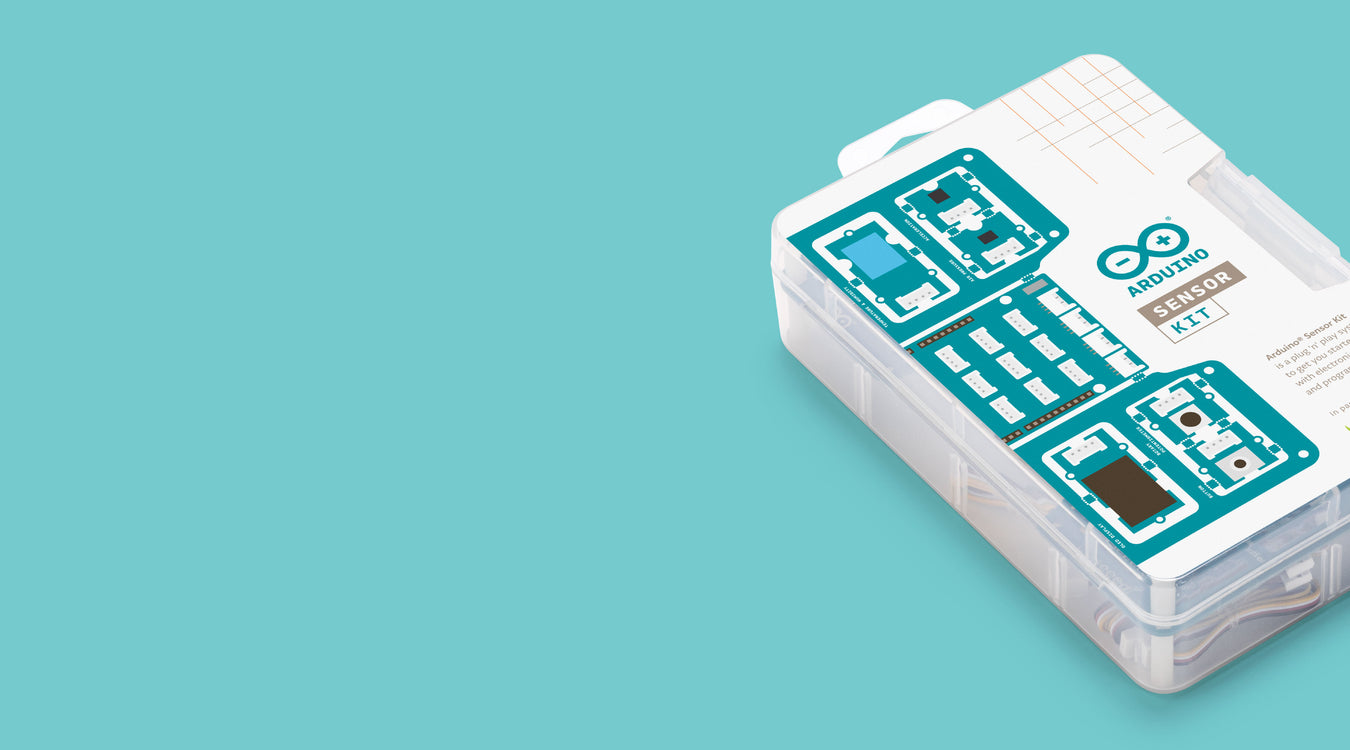
Arduino Sensor Kit- Base
The official all-in-one Sensor Kit specifically designed for the Arduino UNO








The official all-in-one Sensor Kit specifically designed for the Arduino UNO
The new dimension of making
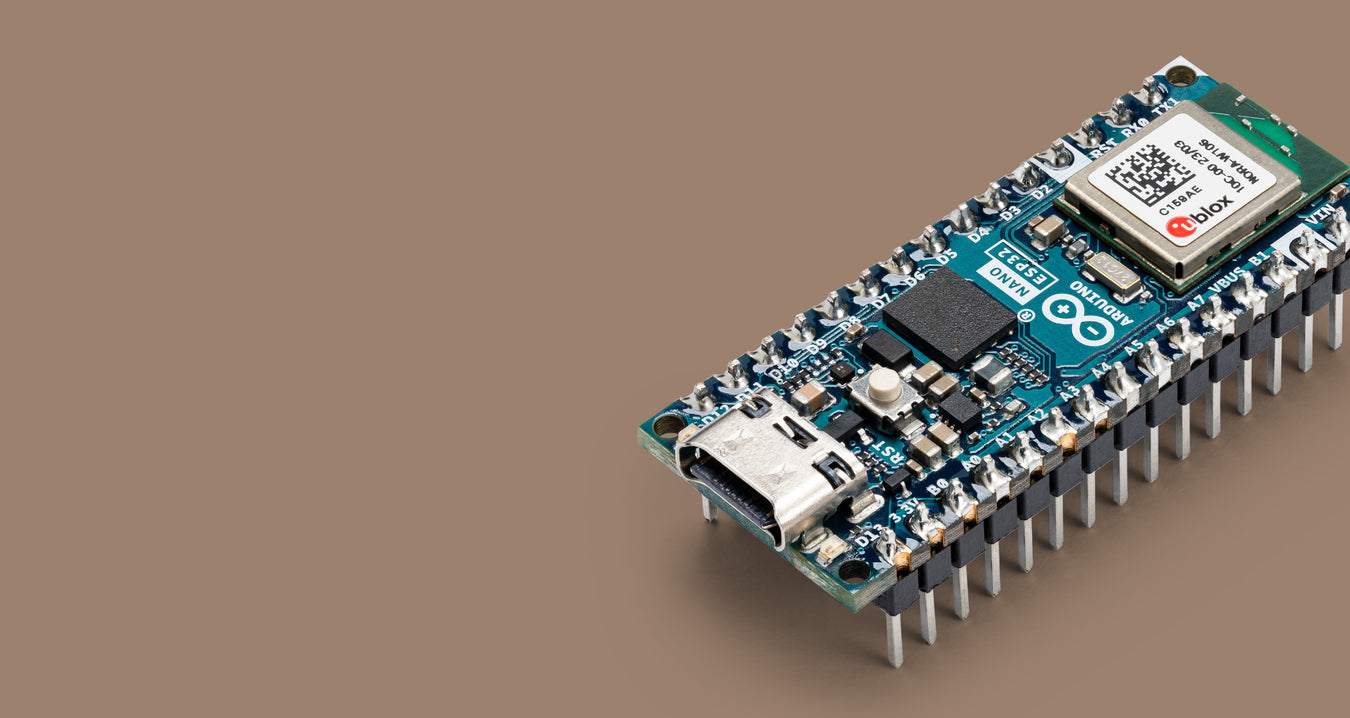
Discover the easy way to build IoT projects with the power of the ESP32-S3

Easily develop handheld devices or dashboards with an intuitive interface

Things you can do with Jay-D: Play multiple music files simultaneously Add equalizers, fade between songs and control their BPMs Load new songs on the included SD card Design a custom li...

CircuitPet is a DIY virtual pet similar to Tamagotchi. This gadget teaches about RTC (real-time clocks), microcomputers and other electronic components, TFT LCD displays, embedded programming, vide...
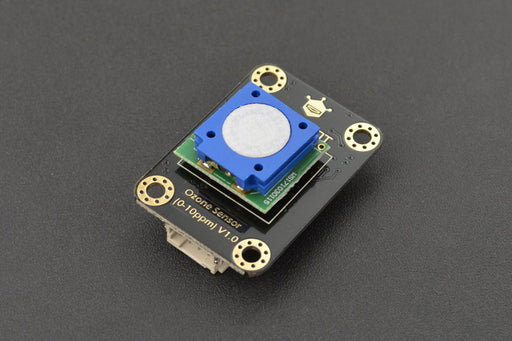
Gravity: I2C Ozone Sensor (0-10ppm) is based on electrochemical principles and it can measure the ambient O3 concentration accurately and conveniently. With high anti-interference ability, high sta...

This shield pulls out the pins of the motherboard and expands to 8 Grove connectors, including 3 Grove digital connectors, 3 Grove analog connectors, 1 Grove I2C connector, and 1 Grove UART connect...

Extremely flexible, even after folded it always returns to its original shape. Dimensions 450 x 300 mm. Make your soldering and repair work easy with this multifunctional mat. ESD-Safe Heat-res...

It allows you to hold small objects and to have both hands free. The adjustable tweezers and the adjustable magnifying glass, available to you, allow you to carry out precision work with extreme co...

TS80P is the upgraded version of TS80 Smart Soldering Iron. TS80P is a smart soldering iron powered by USB Type-C® PD2.0/QC3.0 standard input, which can be powered by charging plugs, power banks an...

TS80P controller is made of aluminum alloy through CNC into a compact structure and high-tech design, ergonomic, beautiful and fashionable. S80P is a smart soldering iron powered by USB Type-C® PD...
{"one"=>"Select 2 or 3 items to compare", "other"=>"{{ count }} of 3 items selected"}