






Overview
Provide reliable data for air purifier system Easy maintenance PWM output Grove compatible interface Compact and light design.
This Dust Sensor gives a good indication of the air quality in an environment by measuring the dust concentration. The Particulate Matter level (PM level) in the air is measured by counting the Low Pulse Occupancy time (LPO time) in a given time unit. LPO time is proportional to PM concentration. This sensor can provide reliable data for air purifier systems; it is responsive to PM of diameter 1μm.
Note:
This sensor uses a counting method to measure dust concentration, not weighing method, and the unit is pcs/L or pcs/0.01cf.
Please pay attention to the warnings listed here.
Features:
- Grove compatible interface(extra wire with connector)
- Supply voltage range: 5V
- Minimum detect particle: 1um
- PWM output
- Dimensions: 59(W)x45(H)x22(D) [mm]
Application Ideas:
- Air Purifier
- Air Quality Monitor
- Air Conditioner
- Ventilator
Get Inspired
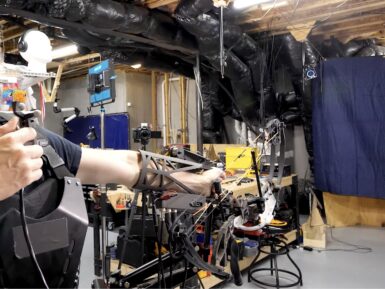
After becoming frustrated at his lack of archery skills and not wanting to spend an eternity practicing getting better, Shane Wighton (known as Stuff Made Here on YouTube) sought to build a rig that could automatically correct his aim for the perfect shot every time. The device is comprised of a rigid sleeve that fits over the wearer’s forearm, along with a pair of stepper motors that can adjust where the bow is pointing either vertically or horizontally via a rack-and-pinion. These motors are driven by an Adafruit microcontroller running CircuitPython and a couple of motor driver modules that provide the necessary current. But that's not all, he also created a small rig that uses an Arduino Uno and servo motor to autonomously fling targets into the air. Target tracking is achieved by having a set of eight OptiTrack cameras around the room monitor the space for tiny gray spheres, and through the use of a special triangulation algorithm, they can accurately determine where both the arrow is pointing and where the target is in 3D space. Initially, the system missed all of its shots due to poor software and the wrong kind of bow, so Wighton completely rewrote his program and switched to a compound bow instead. Once everything had been corrected, the software was able to predict where a flying target would end up according to its speed, and thus had the ability to intercept it. The Auto-Aiming Bow could also hit a target the size of a 3mm-wide circle with scary precision.



