







HM0360 VGA Monochrome DVP Camera Module for Arduino GIGA R1 WiFi Board
Low light sensitive, ultralow power consumption, simple interface, compatibility with Arduino libraries, suitable for battery-powered and energy-efficient applications.
Overview
The camera module is based on HM0360 VGA image sensor, which is an ultralow power, Back Side Illuminated (BSI) CMOS sensor designed for energy efficient smart vision applications, such as object-specific classification, tracking, and identification. The VGA resolution is ideal for monitoring, detection and image capture for wide field of view camera devices.
The low consumption camera module is equipped with a 64°(DFOV) stock Lens. It supports 8-bit RAW output format. The standrad operating temperature is between -30~85℃, with the stable Image temp. between 0~50℃.
It is fully compatible with Arduino GIGA R1 WiFi board, a professional-grade microcontroller development board recently launched by Arduino. Seamlessly integrates with our camera module, unlocking versatile image capture and processing capabilities. Harness the power of Arduino GIGA R1 WiFi and gain a competitive edge in your projects.
Features:
- Cost-Effective: Affordable solution for implementing visual capabilities in cost-sensitive projects.
- Compact Size: Compact form factor enables integration into space-constrained applications.
- Simplify Embedded Vision for All: Easy to set up and operate. Making it possible to add machine vision to your GIGA R1 WiFi board without much effort at all.
- High Precision: With on chip high precision oscillator, Bad Pixel correction(BPC), auto exposure/gain, amblent light sensor and zone detection
- Low Power Consumption: Efficient power usage, making it suitable for battery-powered and energy-efficient applications.
Tech specs
| Image Sensor | HM0360 |
| Resolution | VGA |
| Optical Size | 1/6'' |
| Number of effective pixels | 640(H) × 480(V) |
| Pixel Size | 3.6μm × 3.6μm |
| Support Platform | Arduino GIGA R1 WiFi Board |
| Shutter Type | Electronic Rolling Shutter |
| Color Filter Array | Monochrome |
| Frame Rate | 640x480@15fps, 320x240/160x120@30fps |
| Output Format | RAW8/RAW4 |
| F.NO | 2.8±5% |
| Focus Type | Fixed Focus |
| Focal Length | 2.59mm |
| Field of View(FOV) | 64°(D) |
| Power Supply | AVDD: 2.8V; DOVDD: 1.8V; DVDD: 1.2V |
| Operating Temperature | -30~85℃ |
| Camera Board Size | 30.5mm x 30.5mm |
Documentation
Get Inspired
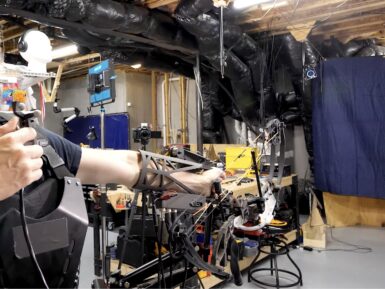
After becoming frustrated at his lack of archery skills and not wanting to spend an eternity practicing getting better, Shane Wighton (known as Stuff Made Here on YouTube) sought to build a rig that could automatically correct his aim for the perfect shot every time. The device is comprised of a rigid sleeve that fits over the wearer’s forearm, along with a pair of stepper motors that can adjust where the bow is pointing either vertically or horizontally via a rack-and-pinion. These motors are driven by an Adafruit microcontroller running CircuitPython and a couple of motor driver modules that provide the necessary current. But that's not all, he also created a small rig that uses an Arduino Uno and servo motor to autonomously fling targets into the air. Target tracking is achieved by having a set of eight OptiTrack cameras around the room monitor the space for tiny gray spheres, and through the use of a special triangulation algorithm, they can accurately determine where both the arrow is pointing and where the target is in 3D space. Initially, the system missed all of its shots due to poor software and the wrong kind of bow, so Wighton completely rewrote his program and switched to a compound bow instead. Once everything had been corrected, the software was able to predict where a flying target would end up according to its speed, and thus had the ability to intercept it. The Auto-Aiming Bow could also hit a target the size of a 3mm-wide circle with scary precision.



