





Overview
Nano Motor Carrier is the perfect add-on for the Nano 33 IoT board as it works to extend and power up its functionality.
Designed to facilitate motor control, Nano Motor Carrier takes care of the electronics required to control motors, allowing students to focus on prototyping and building their projects. It can also be used to connect other actuators and sensors via a series of 3-pin male headers. The board features are: on board 9 axis accelerometer, gyroscope and magnetometer. It includes a battery charger for single cell Li-ion batteries and it contains 2 ports for quadrature encoder counting.
To use the carrier, simply connect it to a Nano 33 board and attach the motors you need for your project. Once connected, attach the USB cable to the Nano 33 IoT. Download Arduino Motor Carrier library from the library manager and you’re all set up to start programming and controlling your motors using the motor drivers.
When working with motors, you need an external power source to feed the motor drivers and power the motors. You can do this by connecting a 1 cell Li-Ion battery to the battery connector or by using an external power source.
Tech specs
|
Microcontroller |
ATSAMD11 ( Arm Cortex-M0+ @48 Mhz) |
| Motor Drivers (x4) | MP6522 |
| Max Input voltage (power terminals) | 4V (1S Li-Ion Battery) |
| Max output current per motor driver | 500 mA |
| Motor driver output voltage | 12V |
| Over Temperature shutdown protection (for DC motor drivers) | Yes |
| Battery charging | Yes |
| Max battery charging current | 500mA (configurable) |
| Power terminals (connectors) | XT-30 and 2POS terminal block |
| Servo connector | 4 terminals |
| Encoder inputs | 2 ports |
| DC motor control | 4 ports |
| 3V digital/analog sensor input/output | 4 ports |
| IMU | BNO055 9axis Acc/Gyr/Mag |
Resources for Safety and Products
Manufacturer Information
The production information includes the address and related details of the product manufacturer.
Arduino S.r.l.
Via Andrea Appiani, 25
Monza, MB, IT, 20900
https://www.arduino.cc/
Responsible Person in the EU
An EU-based economic operator who ensures the product's compliance with the required regulations.
Arduino S.r.l.
Via Andrea Appiani, 25
Monza, MB, IT, 20900
Phone: +39 0113157477
Email: support@arduino.cc
Documentation
OSH: Schematics
Arduino Nano Motor Carrier is open-source hardware! You can build your own board using the following files:
Learn more
Get Inspired
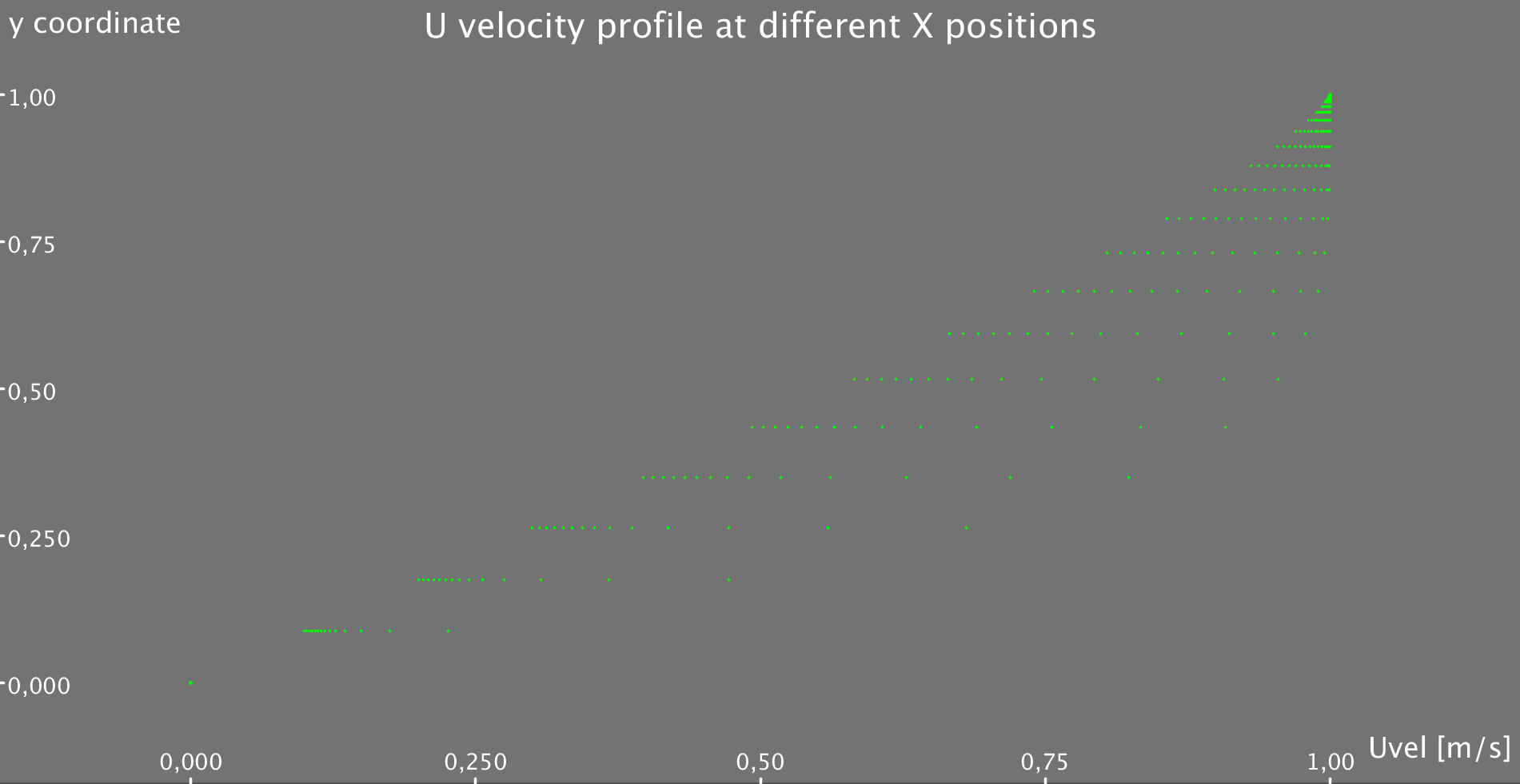
Simple Code that allows you to solve the 2D flow equation for a flat plate Boundary Layer!!

Who doesn’t want to explore underwater? To take a journey beneath the surface of a lake or even the ocean? But a remotely operated vehicle (ROV), which is the kind of robot you’d use for such an adventure, isn’t exactly the kind of thing you’ll find on the shelf at your local Walmart. You can, however, follow this guide from Ranuga Amarasinghe to build your own ROV for some aquatic fun. Amarasinghe is a 16-year-old Sri Lankan student and this is actually the second iteration of his ROV design. As such, he's dubbed it “ROV2” and it appears to be quite capable. All of its electronics sit safely within a 450mm length of sealed PVC tube. That mounts onto the aluminum extrusion frame structure that also hosts the six thrusters powered by drone-style brushless DC motors. ROV2’s brain is an Arduino Mega 2560 board and it drives the BLDC motors through six electronic speed controllers (ESCs). It receives control commands from the surface via an umbilical. The operator holds a Flysky transmitter that sends radio signals to a receiver floating on the water. An Arduino UNO Rev3 reads those and then communicates the motor commands to the Mega through the tethered serial connection. That limits the maximum length of the tether to about 40 meters, which subsequently limits the maximum operating depth. With the specified lithium battery pack, ROV2 can traverse the depths for 30-45 minutes. And when equipped with the 720p FPV camera, pilots can see and record all of the underwater action.



